A Physiological Computing System to Improve Human-Robot Collaboration by using Human Comfort Index
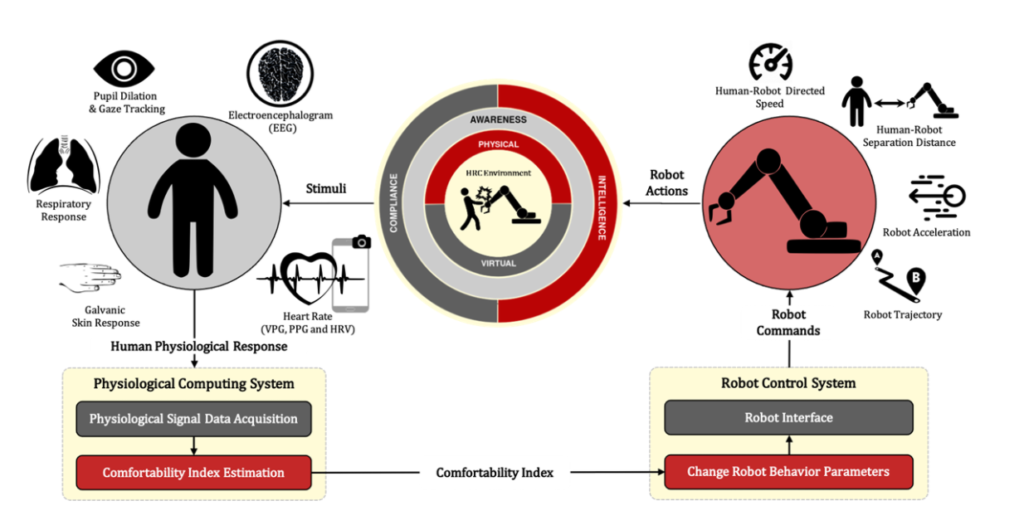
Fluent human-robot collaboration requires a robot teammate to understand, learn, and adapt to the human’s psycho-physiological state. Such collaborations require a physiological computing system that monitors human physiological signals during human-robot collaboration to quantitatively estimate a human’s level of comfort. The existing ISO standard does not take physiological computing into account. In order to include physiological computing in HRC, we developed a framework for estimating the human comfortability level during HRC, the comfort index (CI), using physiological signals. Once the CI is estimated then the robot can change its behavior based on this estimate. The CI Estimation System framework developed in CMCR Lab has enabled several human-subject experiments in recent years. In this talk, the key aspects of the experimental designs, the challenges and solutions for data collection, an alternative way of collecting subjective responses, and how CI is estimated using the circumplex model will be presented.